selected publications
-
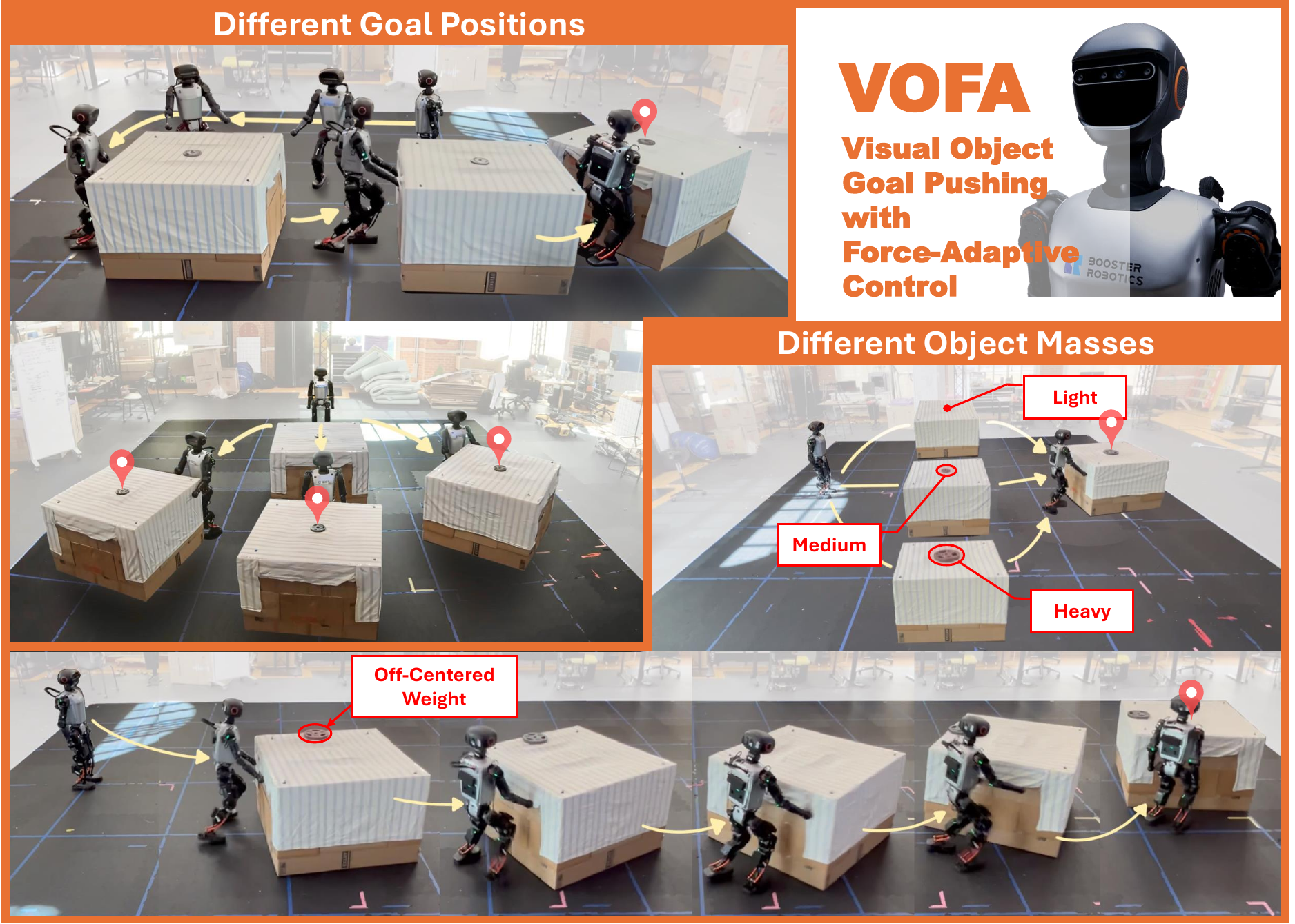 VOFA: Visual Object Goal Pushing with Force-Adaptive Control for Humanoids2026Submitted to IROS 2026
VOFA: Visual Object Goal Pushing with Force-Adaptive Control for Humanoids2026Submitted to IROS 2026 -
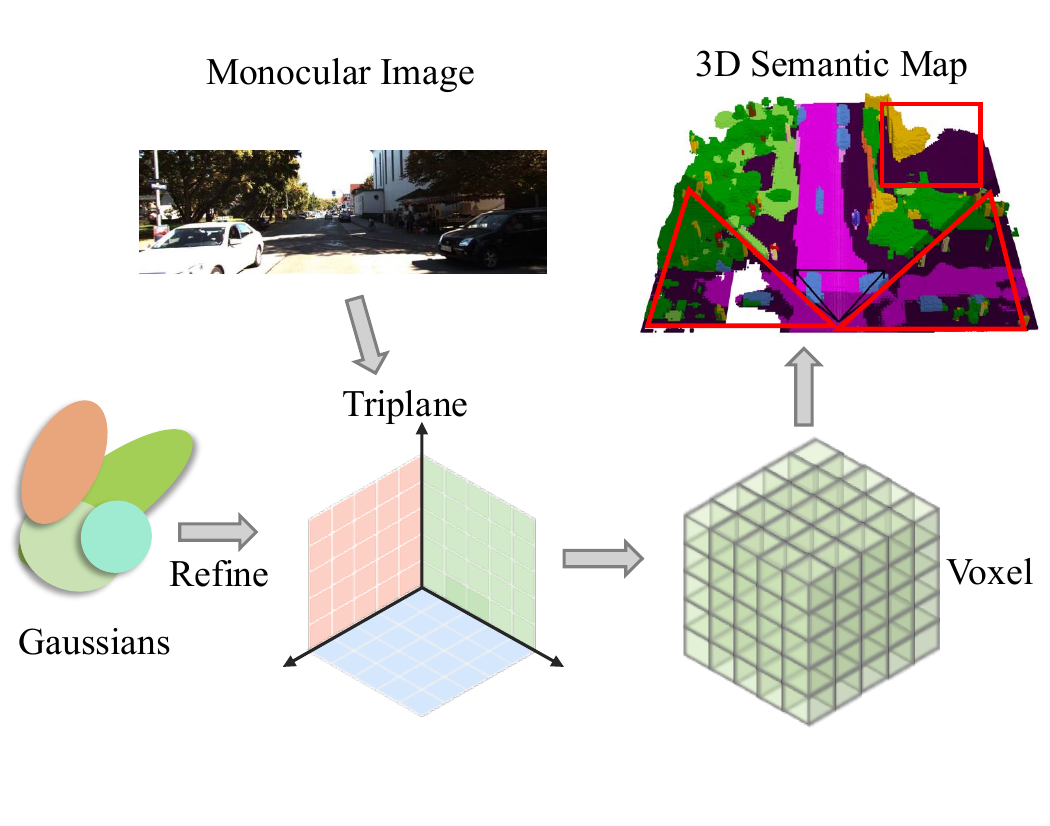 GaussianSSC: Triplane-Guided Directional Gaussian Fields for 3D Semantic Completion2026Submitted to IROS 2026
GaussianSSC: Triplane-Guided Directional Gaussian Fields for 3D Semantic Completion2026Submitted to IROS 2026 - Probabilistic Active Loop Closure for Autonomous ExplorationIn 2024 IEEE International Conference on Robotics and Automation (ICRA), 2024
- Synthesis of Stabilizing Recurrent Equilibrium Network ControllersIn 2022 IEEE 61st Conference on Decision and Control (CDC), 2022
- Learning Neural Networks under Input-Output SpecificationsIn 2022 American Control Conference (ACC), 2022
-