Galaxy Yin (He Yin) | Amazon Robotics
Senior Applied Scientist at Amazon Robotics | UC Berkeley PhD

Amazon Robotics Personal Robotics Group
Sunnyvale, CA
I am Galaxy Yin, a robotics researcher and applied scientist working at the intersection of deep learning, whole-body control, and end-to-end navigation for humanoid robots.
My current interests include:
- Vision-Language-Action (VLA) models for humanoid robot navigation
- Video-Action-Models (VAM) for humanoid robot navigation
- Vision based whole body control for autonomous tasks
- RL based loco-manipulation policies for humanoid robot
I develop scalable loco-manipulation policies for humanoid robots, with hands-on experience solving sim-to-real challenges, and building teacher-student policy pipelines.
Recently, I have focused on VLA models for humanoid robot navigation. I have built the pipeline for collecting and annotating expert demonstration data, and improved model performance through supervised fine-tuning, outperforming both the expert policy and the baseline VLA. Also actively explored video-action-model-based approaches for navigation.
My background includes a PhD in Controls from UC Berkeley and work spanning RL, VLA, SLAM, and safety/stability analysis for complex robotic systems.
You can find my publications on my Google Scholar profile.
news
| Oct 01, 2025 | Became a Senior Applied Scientist at Amazon Robotics. |
|---|---|
| Jun 30, 2025 | Our work “ET-Former: Efficient Triplane Deformable Attention for 3D Semantic Scene Completion From Monocular Camera” has been accepted by IROS 2025. |
| May 15, 2024 | Our work “Probabilistic Active Loop Closure for Autonomous Exploration” has been published at ICRA 2024. |
| Jul 01, 2022 | Joined Amazon as an Applied Scientist II. |
| May 15, 2021 | Completed PhD at UC Berkeley on Safe Learning Based Control. |
selected projects
Navigation World Model
Compact future-view prediction for navigation, summarized by quality and latency metrics.
- Generates short visual rollouts that are useful for comparing navigation futures.
- Retains similar visual quality while reducing sampling latency for the fast variant.
- Current evidence is summarized with decoded-frame quality and per-sample runtime.
- 17.43 -> 17.28
- PSNR, final to fast
- 20.76 -> 21.17
- MAE, final to fast
- 2.56s -> 0.53s
- latency per sample
- 4
- shared validation samples
selected publications
- VOFA: Visual Object Goal Pushing with Force-Adaptive Control for Humanoids2026Submitted to IROS 2026
-
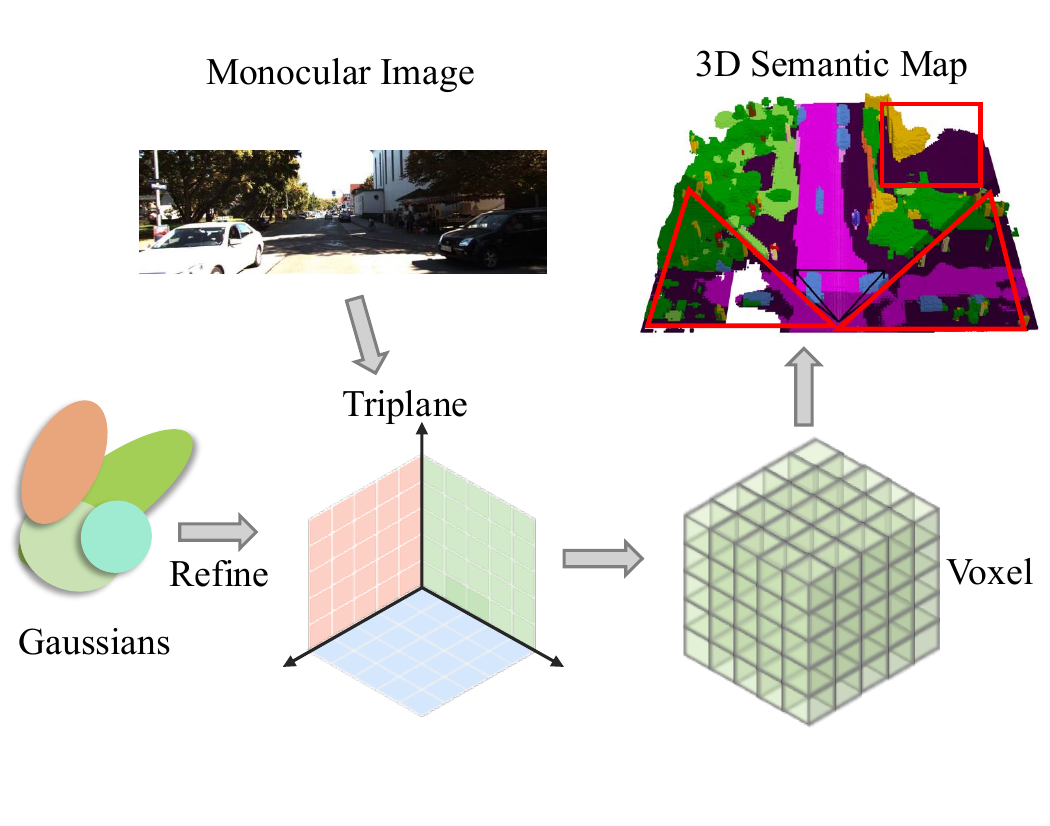 GaussianSSC: Triplane-Guided Directional Gaussian Fields for 3D Semantic Completion2026Submitted to IROS 2026
GaussianSSC: Triplane-Guided Directional Gaussian Fields for 3D Semantic Completion2026Submitted to IROS 2026 - Probabilistic Active Loop Closure for Autonomous ExplorationIn 2024 IEEE International Conference on Robotics and Automation (ICRA), 2024
- Synthesis of Stabilizing Recurrent Equilibrium Network ControllersIn 2022 IEEE 61st Conference on Decision and Control (CDC), 2022
- Learning Neural Networks under Input-Output SpecificationsIn 2022 American Control Conference (ACC), 2022
-
pageviews
